#include <acq.h>
Public Member Functions | |
| Controller (struct pcie_bars &) | |
| acq_error | start_acquisition () |
| void | stop_acquisition () |
| template<class Data > | |
| std::vector< Data > | get_result () |
| template<class Data > | |
| std::vector< Data > | result (std::optional< std::chrono::milliseconds > wait_time=std::nullopt) |
| acq_status | get_acq_status () |
| template<typename T > | |
| void | print_csv (FILE *f, std::vector< T > &res) |
 Public Member Functions inherited from RegisterController Public Member Functions inherited from RegisterController | |
| void | set_devinfo (const struct sdb_device_info &) override |
| virtual void | write_params () |
| Public Member Functions inherited from RegisterDecoderBase | |
| void | check_devinfo_is_set () const |
| virtual void | set_devinfo (const struct sdb_device_info &) |
Public Attributes | |
| unsigned | channel = 0 |
| unsigned | pre_samples = 4 |
| unsigned | post_samples = 0 |
| unsigned | number_shots = 1 |
| std::string | trigger_type = "now" |
| unsigned | data_trigger_threshold = 0 |
| bool | data_trigger_polarity_neg = true |
| unsigned | data_trigger_sel = 0 |
| unsigned | data_trigger_filt = 1 |
| unsigned | data_trigger_channel = 0 |
| unsigned | trigger_delay = 0 |
| Public Attributes inherited from RegisterDecoderBase | |
| const device_match_fn | match_devinfo_lambda |
Private Types | |
| enum class | acq_step { stop , started , done } |
Private Member Functions | |
| void | get_internal_values () |
| void | encode_params () override |
| bool | acquisition_ready () |
| void | set_devinfo_callback () override |
Additional Inherited Members | |
| Protected Member Functions inherited from RegisterController | |
| RegisterController (struct pcie_bars &bars, const struct sdb_device_info &) | |
| virtual void | set_devinfo_callback () |
| virtual void | encode_params ()=0 |
| virtual void | unset_commands () |
| Protected Member Functions inherited from RegisterDecoderBase | |
| void | set_read_dest (auto &dest) |
| RegisterDecoderBase (struct pcie_bars &, const struct sdb_device_info &) | |
| virtual void | read () |
| Protected Attributes inherited from RegisterDecoderBase | |
| size_t | read_size |
| void * | read_dest |
| struct pcie_bars & | bars |
| struct sdb_device_info | devinfo |
| size_t | addr |
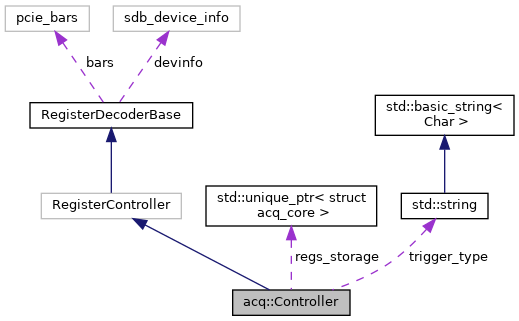
Detailed Description
For most users, the Core class isn't relevant, since it simply provides the current state of this core's registers, which doesn't reflect any hardware state beyond the acquisition state machine. This class is the relevant one, because it provides an interface to control an acquisition, and obtain its data.
It can also be used to control an acquisition asynchronously and safely, while still registering the configuration for the next acquisition.
Member Function Documentation
◆ encode_params()
|
overrideprivatevirtual |
Child classes must implement this function to encode their configuration parameters into hardware registers
Implements RegisterController.
◆ get_acq_status()
| acq_status acq::Controller::get_acq_status | ( | ) |
Get acquisition status. For asynchronous use
◆ set_devinfo_callback()
|
overrideprivatevirtual |
Child classes can implement this function to capture one-time values from hardware and perform any other necessary initialization
Reimplemented from RegisterController.
The documentation for this class was generated from the following files:
- include/modules/acq.h
- modules/acq.cc